
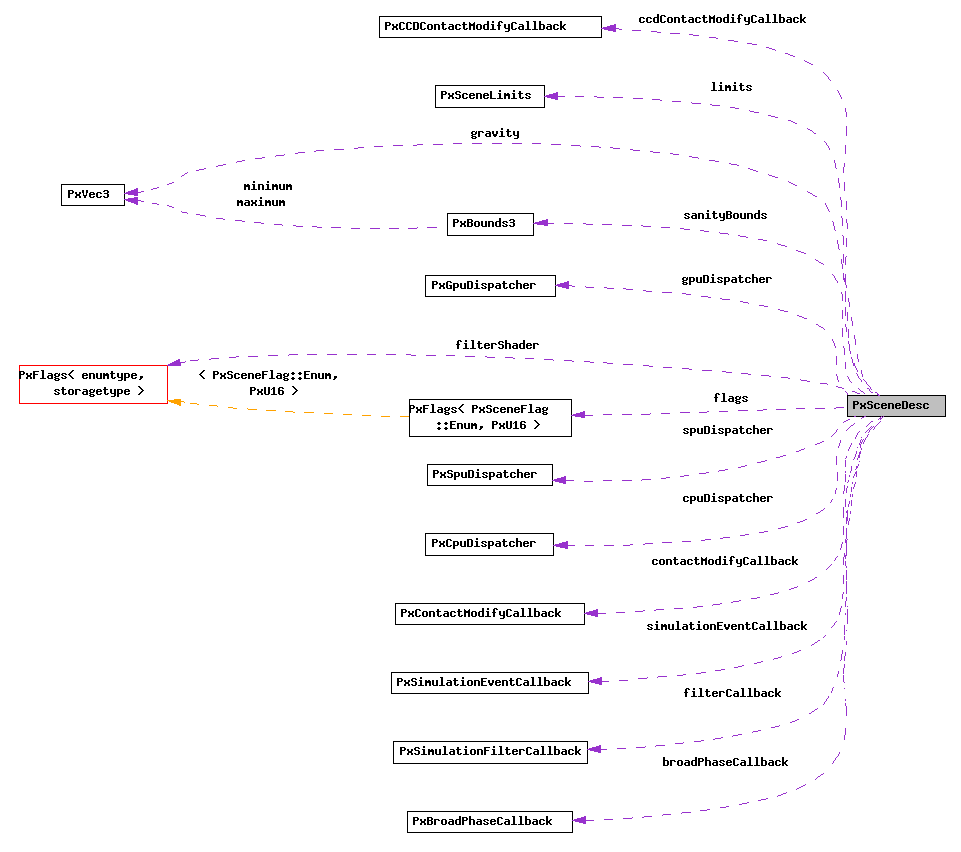
Descriptor class for scenes. See PxScene. More...
#include <PxSceneDesc.h>
Public Member Functions | |
| PX_INLINE | PxSceneDesc (const PxTolerancesScale &scale) |
| constructor sets to default. More... | |
| PX_INLINE void | setToDefault (const PxTolerancesScale &scale) |
| (re)sets the structure to the default. More... | |
| PX_INLINE bool | isValid () const |
| Returns true if the descriptor is valid. More... | |
Public Attributes | |
| PxVec3 | gravity |
| Gravity vector. More... | |
| PxSimulationEventCallback * | simulationEventCallback |
| Possible notification callback. More... | |
| PxContactModifyCallback * | contactModifyCallback |
| Possible asynchronous callback for contact modification. More... | |
| PxCCDContactModifyCallback * | ccdContactModifyCallback |
| Possible asynchronous callback for contact modification. More... | |
| const void * | filterShaderData |
| Shared global filter data which will get passed into the filter shader. More... | |
| PxU32 | filterShaderDataSize |
| Size (in bytes) of the shared global filter data filterShaderData. More... | |
| PxSimulationFilterShader | filterShader |
| The custom filter shader to use for collision filtering. More... | |
| PxSimulationFilterCallback * | filterCallback |
| A custom collision filter callback which can be used to implement more complex filtering operations which need access to the simulation state, for example. More... | |
| PxBroadPhaseType::Enum | broadPhaseType |
| Selects the broad-phase algorithm to use. More... | |
| PxBroadPhaseCallback * | broadPhaseCallback |
| Broad-phase callback. More... | |
| PxSceneLimits | limits |
| Expected scene limits. More... | |
| PX_DEPRECATED PxReal | meshContactMargin |
| A small margin value used for mesh collision detection. (convex/box vs height field or convex/box vs triangle mesh) More... | |
| PxFrictionType::Enum | frictionType |
| Selects the friction algorithm to use for simulation. More... | |
| PX_DEPRECATED PxReal | contactCorrelationDistance |
| The patch friction model uses this coefficient to determine if a friction anchor can persist between frames. More... | |
| PxReal | bounceThresholdVelocity |
| A contact with a relative velocity below this will not bounce. A typical value for simulation. stability is about 0.2 * gravity. More... | |
| PxReal | frictionOffsetThreshold |
| A threshold of contact separation distance used to decide if a contact point will experience friction forces. More... | |
| PxSceneFlags | flags |
| Flags used to select scene options. More... | |
| PxCpuDispatcher * | cpuDispatcher |
| The CPU task dispatcher for the scene. More... | |
| PxGpuDispatcher * | gpuDispatcher |
| The GPU task dispatcher for the scene. More... | |
| PxSpuDispatcher * | spuDispatcher |
| The SPU task dispatcher for the scene. More... | |
| PxPruningStructure::Enum | staticStructure |
| Defines the structure used to store static objects. More... | |
| PxPruningStructure::Enum | dynamicStructure |
| Defines the structure used to store dynamic objects. More... | |
| PxU32 | dynamicTreeRebuildRateHint |
| Hint for how much work should be done per simulation frame to rebuild the pruning structure. More... | |
| void * | userData |
| Will be copied to PxScene::userData. More... | |
| PxU32 | solverBatchSize |
| Defines the number of actors required to spawn a separate rigid body solver island task chain. More... | |
| PxU32 | nbContactDataBlocks |
| Setting to define the number of 16K blocks that will be initially reserved to store contact, friction, and contact cache data. This is the number of 16K memory blocks that will be automatically allocated from the user allocator when the scene is instantiated. Further 16k memory blocks may be allocated during the simulation up to maxNbContactDataBlocks. More... | |
| PxU32 | maxNbContactDataBlocks |
| Setting to define the maximum number of 16K blocks that can be allocated to store contact, friction, and contact cache data. As the complexity of a scene increases, the SDK may require to allocate new 16k blocks in addition to the blocks it has already allocated. This variable controls the maximum number of blocks that the SDK can allocate. More... | |
| PxU32 | contactReportStreamBufferSize |
| Size of the contact report stream (in bytes). More... | |
| PxU32 | ccdMaxPasses |
| Maximum number of CCD passes. More... | |
| PxSimulationOrder::Enum | simulationOrder |
| The simulation order PhysX supports 2 simulation update approaches. The default model - eCOLLIDE_SOLVE - performs collision detection before solver. The alternative model, eSOLVE_COLLIDE (This feature is currently disabled), performs solve before collision. This has the performance benefit of allowing the game to defer collision detection for the subsequent frame so that it can overlap with things like game logic, rendering etc. However, it has the disadvantage that it requires insertions, removals and teleports to be deferred between dispatching collision detection and solve, which can potentially cause 1 frame's delay in these operations. More... | |
| PxReal | wakeCounterResetValue |
| The wake counter reset value. More... | |
| PxBounds3 | sanityBounds |
| The bounds used to sanity check user-set positions of actors and articulation links. More... | |
Descriptor class for scenes. See PxScene.
This struct must be initialized with the same PxTolerancesScale values used to initialize PxPhysics.
| PxReal PxSceneDesc::bounceThresholdVelocity |
A contact with a relative velocity below this will not bounce. A typical value for simulation. stability is about 0.2 * gravity.
Range: [0, PX_MAX_F32)
Default: 0.2 * PxTolerancesScale::speed
Referenced by isValid().
| PxBroadPhaseCallback* PxSceneDesc::broadPhaseCallback |
Broad-phase callback.
This callback will be associated with the client PX_DEFAULT_CLIENT. Please use PxScene::setBroadPhaseCallback() to register callbacks for other clients.
Default: NULL
| PxBroadPhaseType::Enum PxSceneDesc::broadPhaseType |
| PxCCDContactModifyCallback* PxSceneDesc::ccdContactModifyCallback |
Possible asynchronous callback for contact modification.
Default: NULL
| PxU32 PxSceneDesc::ccdMaxPasses |
Maximum number of CCD passes.
The CCD performs multiple passes, where each pass every object advances to its time of first impact. This value defines how many passes the CCD system should perform.
Default: 1 Range: [1, PX_MAX_U32]
| PX_DEPRECATED PxReal PxSceneDesc::contactCorrelationDistance |
The patch friction model uses this coefficient to determine if a friction anchor can persist between frames.
A friction anchor is a point on a body where friction gets applied, similar to a contact point. The simulation determines new potential friction anchors every time step, and deletes them if over time the bodies that they are attached to slide apart by more than this distance. We believe the user does not need to modify this parameter from its default. For this reason we are planning to remove it in future releases. If you have an application that is relying on modifying this parameter, please let us know.
The alternative Coulomb friction model does not use this coefficient.
Range: [0, PX_MAX_F32)
Default: 0.025 * PxTolerancesScale::length
Referenced by isValid().
| PxContactModifyCallback* PxSceneDesc::contactModifyCallback |
Possible asynchronous callback for contact modification.
Default: NULL
| PxU32 PxSceneDesc::contactReportStreamBufferSize |
Size of the contact report stream (in bytes).
The contact report stream buffer is used during the simulation to store all the contact reports. If the size is not sufficient, the buffer will grow by a factor of two. It is possible to disable the buffer growth by setting the flag PxSceneFlag::eDISABLE_CONTACT_REPORT_BUFFER_RESIZE. In that case the buffer will not grow but contact reports not stored in the buffer will not get sent in the contact report callbacks.
Default: 8192
Range: (0, PX_MAX_U32]
Referenced by isValid().
| PxCpuDispatcher* PxSceneDesc::cpuDispatcher |
The CPU task dispatcher for the scene.
See PxCpuDispatcher, PxScene::getCpuDispatcher
Referenced by isValid().
| PxPruningStructure::Enum PxSceneDesc::dynamicStructure |
Defines the structure used to store dynamic objects.
| PxU32 PxSceneDesc::dynamicTreeRebuildRateHint |
Hint for how much work should be done per simulation frame to rebuild the pruning structure.
This parameter gives a hint on the distribution of the workload for rebuilding the dynamic AABB tree pruning structure PxPruningStructure::eDYNAMIC_AABB_TREE. It specifies the desired number of simulation frames the rebuild process should take. Higher values will decrease the workload per frame but the pruning structure will get more and more outdated the longer the rebuild takes (which can make scene queries less efficient).
Range: [4, PX_MAX_U32)
Default: 100
Referenced by isValid().
| PxSimulationFilterCallback* PxSceneDesc::filterCallback |
A custom collision filter callback which can be used to implement more complex filtering operations which need access to the simulation state, for example.
Default: NULL
| PxSimulationFilterShader PxSceneDesc::filterShader |
The custom filter shader to use for collision filtering.
Referenced by isValid().
| const void* PxSceneDesc::filterShaderData |
Shared global filter data which will get passed into the filter shader.
Default: NULL
Referenced by isValid().
| PxU32 PxSceneDesc::filterShaderDataSize |
Size (in bytes) of the shared global filter data filterShaderData.
Default: 0
Referenced by isValid().
| PxSceneFlags PxSceneDesc::flags |
| PxReal PxSceneDesc::frictionOffsetThreshold |
A threshold of contact separation distance used to decide if a contact point will experience friction forces.
Range: [0, PX_MAX_F32)
Default: 0.04 * PxTolerancesScale::length
Referenced by isValid().
| PxFrictionType::Enum PxSceneDesc::frictionType |
Selects the friction algorithm to use for simulation.
| PxGpuDispatcher* PxSceneDesc::gpuDispatcher |
The GPU task dispatcher for the scene.
Platform specific: Applies to PC GPU only.
| PxVec3 PxSceneDesc::gravity |
Gravity vector.
Range: force vector
Default: Zero
When setting gravity, you should probably also set bounce threshold.
| PxSceneLimits PxSceneDesc::limits |
| PxU32 PxSceneDesc::maxNbContactDataBlocks |
Setting to define the maximum number of 16K blocks that can be allocated to store contact, friction, and contact cache data. As the complexity of a scene increases, the SDK may require to allocate new 16k blocks in addition to the blocks it has already allocated. This variable controls the maximum number of blocks that the SDK can allocate.
In the case that the scene is sufficiently complex that all the permitted 16K blocks are used, contacts will be dropped and a warning passed to the error stream.
If a warning is reported to the error stream to indicate the number of 16K blocks is insufficient for the scene complexity then the choices are either (i) re-tune the number of 16K data blocks until a number is found that is sufficient for the scene complexity, (ii) to simplify the scene or (iii) to opt to not increase the memory requirements of physx and accept some dropped contacts.
Default: 65536, or 256 on PS3
Range: [0, PX_MAX_U32]
Referenced by isValid().
| PX_DEPRECATED PxReal PxSceneDesc::meshContactMargin |
A small margin value used for mesh collision detection. (convex/box vs height field or convex/box vs triangle mesh)
Referenced by isValid().
| PxU32 PxSceneDesc::nbContactDataBlocks |
Setting to define the number of 16K blocks that will be initially reserved to store contact, friction, and contact cache data. This is the number of 16K memory blocks that will be automatically allocated from the user allocator when the scene is instantiated. Further 16k memory blocks may be allocated during the simulation up to maxNbContactDataBlocks.
Default: 0, or 256 on PS3
Range: [0, PX_MAX_U32]
Referenced by isValid().
| PxBounds3 PxSceneDesc::sanityBounds |
The bounds used to sanity check user-set positions of actors and articulation links.
These bounds are used to check the position values of rigid actors inserted into the scene, and positions set for rigid actors already within the scene.
Range: any valid PxBounds3
Default: (-PX_MAX_BOUNDS_EXTENTS, PX_MAX_BOUNDS_EXTENTS) on each axis
Referenced by isValid().
| PxSimulationEventCallback* PxSceneDesc::simulationEventCallback |
Possible notification callback.
This callback will be associated with the client PX_DEFAULT_CLIENT. Please use PxScene::setSimulationEventCallback() to register callbacks for other clients.
Default: NULL
| PxSimulationOrder::Enum PxSceneDesc::simulationOrder |
The simulation order PhysX supports 2 simulation update approaches. The default model - eCOLLIDE_SOLVE - performs collision detection before solver. The alternative model, eSOLVE_COLLIDE (This feature is currently disabled), performs solve before collision. This has the performance benefit of allowing the game to defer collision detection for the subsequent frame so that it can overlap with things like game logic, rendering etc. However, it has the disadvantage that it requires insertions, removals and teleports to be deferred between dispatching collision detection and solve, which can potentially cause 1 frame's delay in these operations.
Default: eCOLLIDE_SOLVE
Referenced by isValid().
| PxU32 PxSceneDesc::solverBatchSize |
Defines the number of actors required to spawn a separate rigid body solver island task chain.
This parameter defines the minimum number of actors required to spawn a separate rigid body solver task chain. Setting a low value will potentially cause more task chains to be generated. This may result in the overhead of spawning tasks can become a limiting performance factor. Setting a high value will potentially cause fewer islands to be generated. This may reduce thread scaling (fewer task chains spawned) and may detrimentally affect performance if some bodies in the scene have large solver iteration counts because all constraints in a given island are solved by the maximum number of solver iterations requested by any body in the island.
Default: 32
Platform specific: Not applicable on PS3. All bodies are batched into one island.
| PxSpuDispatcher* PxSceneDesc::spuDispatcher |
The SPU task dispatcher for the scene.
Platform specific: Applies to PS3 only.
| PxPruningStructure::Enum PxSceneDesc::staticStructure |
Defines the structure used to store static objects.
Referenced by isValid().
| void* PxSceneDesc::userData |
Will be copied to PxScene::userData.
Default: NULL
| PxReal PxSceneDesc::wakeCounterResetValue |
The wake counter reset value.
Calling wakeUp() on objects which support sleeping will set their wake counter value to the specified reset value.
Range: (0, PX_MAX_F32)
Default: 0.4 (which corresponds to 20 frames for a time step of 0.02)
Referenced by isValid().