 |
|
#include <PxSolverDefs.h>
Public Attributes | |
| Sc::ShapeInteraction * | shapeInteraction |
| Pointer to share interaction. Used for force threshold reports in solver. Set to NULL if using immediate mode. More... | |
| Gu::ContactPoint * | contacts |
| The start of the contacts for this pair. More... | |
| PxU32 | numContacts |
| The total number of contacs this pair references. More... | |
| bool | hasMaxImpulse |
| Defines whether this pairs has maxImpulses clamping enabled. More... | |
| bool | disableStrongFriction |
| Defines whether this pair disables strong friction (sticky friction correlation) More... | |
| bool | hasForceThresholds |
| Defines whether this pair requires force thresholds. More... | |
| PxReal | restDistance |
| A distance at which the solver should aim to hold the bodies separated. Default is 0. More... | |
| PxReal | maxCCDSeparation |
| A distance used to configure speculative CCD behavior. Default is PX_MAX_F32. Set internally in PhysX for bodies with eENABLE_SPECULATIVE_CCD on. Do not set directly! More... | |
| PxU8 * | frictionPtr |
| InOut: Friction patch correlation data. Set each frame by solver. Can be retained for improved behaviour or discarded each frame. More... | |
| PxU8 | frictionCount |
| The total number of friction patches in this pair. More... | |
| PxReal * | contactForces |
| Out: A buffer for the solver to write applied contact forces to. More... | |
| PxU32 | startFrictionPatchIndex |
| Start index of friction patch in the correlation buffer. Set by friction correlation. More... | |
| PxU32 | numFrictionPatches |
| Total number of friction patches in this pair. Set by friction correlation. More... | |
| PxU32 | startContactPatchIndex |
| The start index of this pair's contact patches in the correlation buffer. For internal use only. More... | |
| PxU16 | numContactPatches |
| Total number of contact patches. More... | |
| PxU16 | axisConstraintCount |
| Axis constraint count. Defines how many constraint rows this pair has produced. Useful for statistical purposes. More... | |
| PxReal | maxImpulse |
| PxReal | torsionalPatchRadius |
| PxReal | minTorsionalPatchRadius |
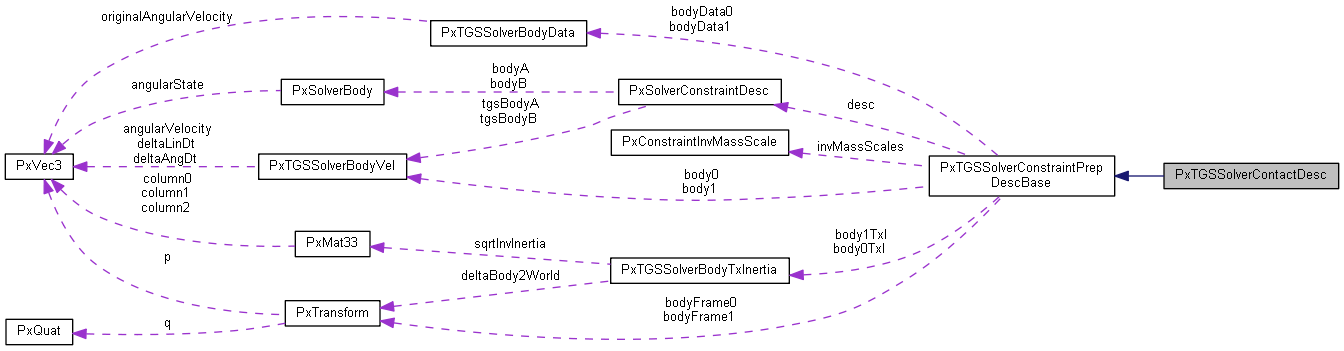
 Public Attributes inherited from PxTGSSolverConstraintPrepDescBase Public Attributes inherited from PxTGSSolverConstraintPrepDescBase | |
| PxConstraintInvMassScale | invMassScales |
| In: The local mass scaling for this pair. More... | |
| PxSolverConstraintDesc * | desc |
| Output: The PxSolverConstraintDesc filled in by contact prep. More... | |
| const PxTGSSolverBodyVel * | body0 |
| In: The first body. Stores velocity information. Unused unless contact involves articulations. More... | |
| const PxTGSSolverBodyVel * | body1 |
| In: The second body. Stores velocity information. Unused unless contact involves articulations. More... | |
| const PxTGSSolverBodyTxInertia * | body0TxI |
| const PxTGSSolverBodyTxInertia * | body1TxI |
| const PxTGSSolverBodyData * | bodyData0 |
| const PxTGSSolverBodyData * | bodyData1 |
| PxTransform | bodyFrame0 |
| In: The world-space transform of the first body. More... | |
| PxTransform | bodyFrame1 |
| In: The world-space transform of the second body. More... | |
| PxSolverContactDesc::BodyState | bodyState0 |
| In: Defines what kind of actor the first body is. More... | |
| PxSolverContactDesc::BodyState | bodyState1 |
| In: Defines what kind of actor the second body is. More... | |
| PxU16 PxTGSSolverContactDesc::axisConstraintCount |
Axis constraint count. Defines how many constraint rows this pair has produced. Useful for statistical purposes.
| PxReal* PxTGSSolverContactDesc::contactForces |
Out: A buffer for the solver to write applied contact forces to.
| Gu::ContactPoint* PxTGSSolverContactDesc::contacts |
The start of the contacts for this pair.
| bool PxTGSSolverContactDesc::disableStrongFriction |
Defines whether this pair disables strong friction (sticky friction correlation)
| PxU8 PxTGSSolverContactDesc::frictionCount |
The total number of friction patches in this pair.
| PxU8* PxTGSSolverContactDesc::frictionPtr |
InOut: Friction patch correlation data. Set each frame by solver. Can be retained for improved behaviour or discarded each frame.
| bool PxTGSSolverContactDesc::hasForceThresholds |
Defines whether this pair requires force thresholds.
| bool PxTGSSolverContactDesc::hasMaxImpulse |
Defines whether this pairs has maxImpulses clamping enabled.
| PxReal PxTGSSolverContactDesc::maxCCDSeparation |
A distance used to configure speculative CCD behavior. Default is PX_MAX_F32. Set internally in PhysX for bodies with eENABLE_SPECULATIVE_CCD on. Do not set directly!
| PxReal PxTGSSolverContactDesc::maxImpulse |
| PxReal PxTGSSolverContactDesc::minTorsionalPatchRadius |
| PxU16 PxTGSSolverContactDesc::numContactPatches |
Total number of contact patches.
| PxU32 PxTGSSolverContactDesc::numContacts |
The total number of contacs this pair references.
| PxU32 PxTGSSolverContactDesc::numFrictionPatches |
Total number of friction patches in this pair. Set by friction correlation.
| PxReal PxTGSSolverContactDesc::restDistance |
A distance at which the solver should aim to hold the bodies separated. Default is 0.
| Sc::ShapeInteraction* PxTGSSolverContactDesc::shapeInteraction |
Pointer to share interaction. Used for force threshold reports in solver. Set to NULL if using immediate mode.
| PxU32 PxTGSSolverContactDesc::startContactPatchIndex |
The start index of this pair's contact patches in the correlation buffer. For internal use only.
| PxU32 PxTGSSolverContactDesc::startFrictionPatchIndex |
Start index of friction patch in the correlation buffer. Set by friction correlation.
| PxReal PxTGSSolverContactDesc::torsionalPatchRadius |