 |
|
#include <PxSolverDefs.h>
Public Attributes | |
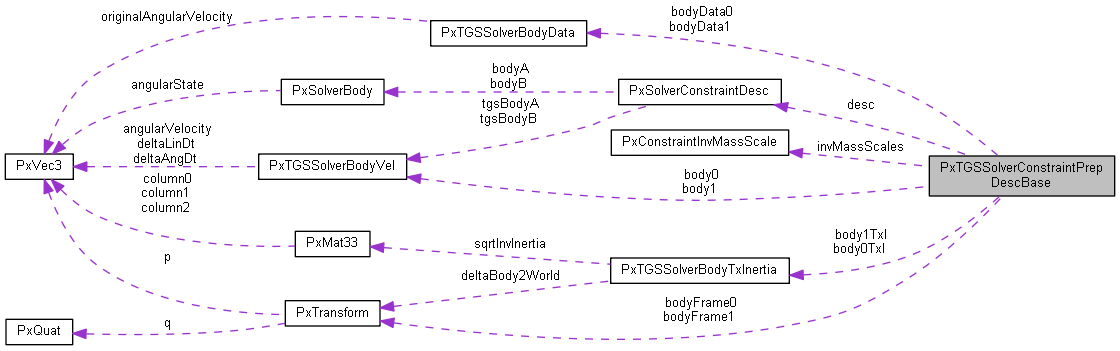
| PxConstraintInvMassScale | invMassScales |
| In: The local mass scaling for this pair. More... | |
| PxSolverConstraintDesc * | desc |
| Output: The PxSolverConstraintDesc filled in by contact prep. More... | |
| const PxTGSSolverBodyVel * | body0 |
| In: The first body. Stores velocity information. Unused unless contact involves articulations. More... | |
| const PxTGSSolverBodyVel * | body1 |
| In: The second body. Stores velocity information. Unused unless contact involves articulations. More... | |
| const PxTGSSolverBodyTxInertia * | body0TxI |
| const PxTGSSolverBodyTxInertia * | body1TxI |
| const PxTGSSolverBodyData * | bodyData0 |
| const PxTGSSolverBodyData * | bodyData1 |
| PxTransform | bodyFrame0 |
| In: The world-space transform of the first body. More... | |
| PxTransform | bodyFrame1 |
| In: The world-space transform of the second body. More... | |
| PxSolverContactDesc::BodyState | bodyState0 |
| In: Defines what kind of actor the first body is. More... | |
| PxSolverContactDesc::BodyState | bodyState1 |
| In: Defines what kind of actor the second body is. More... | |
| const PxTGSSolverBodyVel* PxTGSSolverConstraintPrepDescBase::body0 |
In: The first body. Stores velocity information. Unused unless contact involves articulations.
| const PxTGSSolverBodyTxInertia* PxTGSSolverConstraintPrepDescBase::body0TxI |
| const PxTGSSolverBodyVel* PxTGSSolverConstraintPrepDescBase::body1 |
In: The second body. Stores velocity information. Unused unless contact involves articulations.
| const PxTGSSolverBodyTxInertia* PxTGSSolverConstraintPrepDescBase::body1TxI |
| const PxTGSSolverBodyData* PxTGSSolverConstraintPrepDescBase::bodyData0 |
| const PxTGSSolverBodyData* PxTGSSolverConstraintPrepDescBase::bodyData1 |
| PxTransform PxTGSSolverConstraintPrepDescBase::bodyFrame0 |
In: The world-space transform of the first body.
| PxTransform PxTGSSolverConstraintPrepDescBase::bodyFrame1 |
In: The world-space transform of the second body.
| PxSolverContactDesc::BodyState PxTGSSolverConstraintPrepDescBase::bodyState0 |
In: Defines what kind of actor the first body is.
| PxSolverContactDesc::BodyState PxTGSSolverConstraintPrepDescBase::bodyState1 |
In: Defines what kind of actor the second body is.
| PxSolverConstraintDesc* PxTGSSolverConstraintPrepDescBase::desc |
Output: The PxSolverConstraintDesc filled in by contact prep.
| PxConstraintInvMassScale PxTGSSolverConstraintPrepDescBase::invMassScales |
In: The local mass scaling for this pair.