
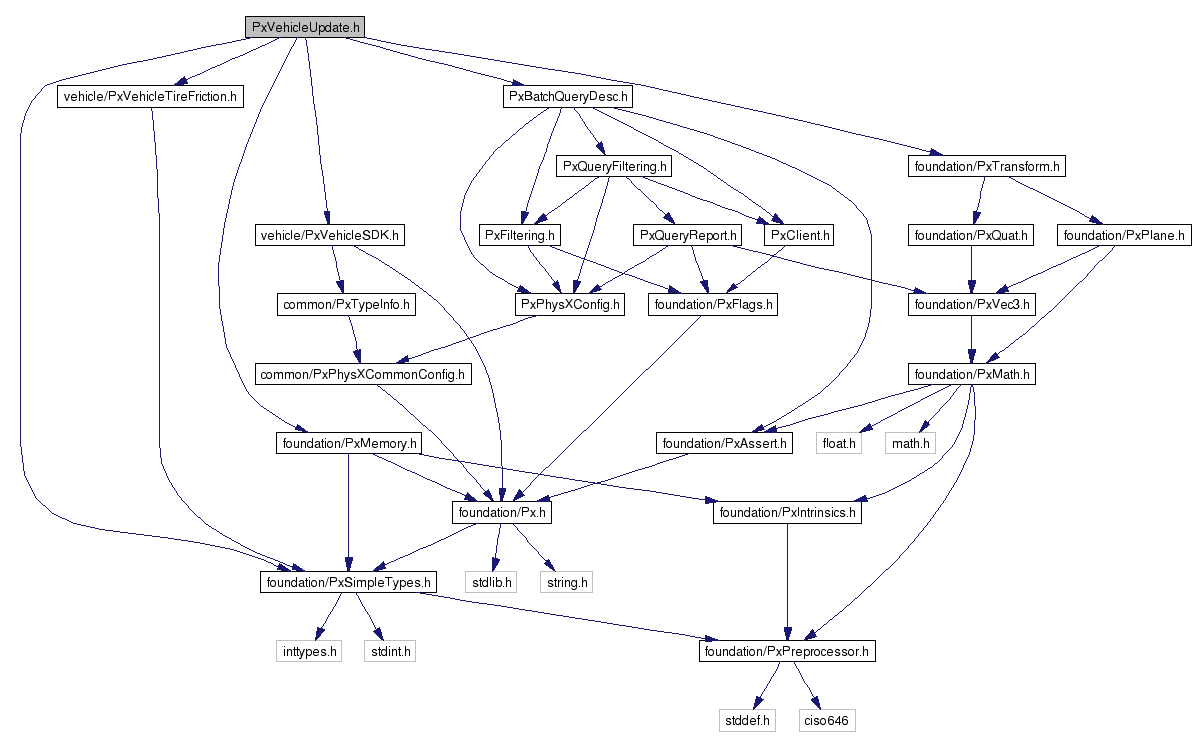
#include "vehicle/PxVehicleSDK.h"#include "vehicle/PxVehicleTireFriction.h"#include "foundation/PxSimpleTypes.h"#include "foundation/PxMemory.h"#include "foundation/PxTransform.h"#include "PxBatchQueryDesc.h"
Go to the source code of this file.
Classes | |
| struct | PxWheelQueryResult |
| Structure containing data describing the non-persistent state of each suspension/wheel/tire unit. This structure is filled out in PxVehicleUpdates and PxVehicleUpdateSingleVehicleAndStoreTelemetryData. More... | |
| struct | PxVehicleWheelQueryResult |
| struct | PxVehicleWheelConcurrentUpdateData |
| Structure containing data that is computed for a wheel during concurrent calls to PxVehicleUpdates but which cannot be safely concurrently applied. More... | |
| struct | PxVehicleConcurrentUpdateData |
| Structure containing data that is computed for a vehicle and its wheels during concurrent calls to PxVehicleUpdates but which cannot be safely concurrently applied. More... | |
Functions | |
| void | PxVehicleSuspensionRaycasts (PxBatchQuery *batchQuery, const PxU32 nbVehicles, PxVehicleWheels **vehicles, const PxU32 nbSceneQueryResults, PxRaycastQueryResult *sceneQueryResults, const bool *vehiclesToRaycast=NULL) |
| Perform raycasts for all suspension lines for all vehicles. | |
| void | PxVehicleSuspensionSweeps (PxBatchQuery *batchQuery, const PxU32 nbVehicles, PxVehicleWheels **vehicles, const PxU32 nbSceneQueryResults, PxSweepQueryResult *sceneQueryResults, const PxU16 nbHitsPerQuery, const bool *vehiclesToSweep=NULL, const PxF32 sweepWidthScale=1.0f, const PxF32 sweepRadiusScale=1.0f) |
| Perform sweeps for all suspension lines for all vehicles. | |
| PxU32 | PxVehicleModifyWheelContacts (const PxVehicleWheels &vehicle, const PxU32 wheelId, const PxF32 wheelTangentVelocityMultiplier, const PxReal maxImpulse, PxContactModifyPair &contactModifyPair) |
| A function called from PxContactModifyCallback::onContactModify. The function determines if rigid body contact points recorded for the wheel's PxShape are likely to be duplicated and resolved by the wheel's suspension raycast. Contact points that will be resolved by the suspension are ignored. Contact points that are accepted (rather than ignored) are modified to account for the effect of the suspension geometry and the angular speed of the wheel. | |
| void | PxVehicleUpdates (const PxReal timestep, const PxVec3 &gravity, const PxVehicleDrivableSurfaceToTireFrictionPairs &vehicleDrivableSurfaceToTireFrictionPairs, const PxU32 nbVehicles, PxVehicleWheels **vehicles, PxVehicleWheelQueryResult *vehicleWheelQueryResults, PxVehicleConcurrentUpdateData *vehicleConcurrentUpdates=NULL) |
| Update an array of vehicles by either applying an acceleration to the rigid body actor associated with each vehicle or by an immediate update of the velocity of the actor. | |
| void | PxVehiclePostUpdates (const PxVehicleConcurrentUpdateData *vehicleConcurrentUpdates, const PxU32 nbVehicles, PxVehicleWheels **vehicles) |
| Apply actor changes that were computed in concurrent calls to PxVehicleUpdates but which could not be safely applied due to the concurrency. | |
| void | PxVehicleShiftOrigin (const PxVec3 &shift, const PxU32 nbVehicles, PxVehicleWheels **vehicles) |
| Shift the origin of vehicles by the specified vector. | |