|
| virtual PxReal | getAngle () const =0 |
| | return the angle of the joint, in the range (-2*Pi, 2*Pi] More...
|
| |
| virtual PxReal | getVelocity () const =0 |
| | return the velocity of the joint More...
|
| |
| virtual void | setLimit (const PxJointAngularLimitPair &limits)=0 |
| | set the joint limit parameters. More...
|
| |
| virtual PxJointAngularLimitPair | getLimit () const =0 |
| | get the joint limit parameters. More...
|
| |
| virtual void | setDriveVelocity (PxReal velocity, bool autowake=true)=0 |
| | set the target velocity for the drive model. More...
|
| |
| virtual PxReal | getDriveVelocity () const =0 |
| | gets the target velocity for the drive model. More...
|
| |
| virtual void | setDriveForceLimit (PxReal limit)=0 |
| | sets the maximum torque the drive can exert. More...
|
| |
| virtual PxReal | getDriveForceLimit () const =0 |
| | gets the maximum torque the drive can exert. More...
|
| |
| virtual void | setDriveGearRatio (PxReal ratio)=0 |
| | sets the gear ratio for the drive. More...
|
| |
| virtual PxReal | getDriveGearRatio () const =0 |
| | gets the gear ratio. More...
|
| |
| virtual void | setRevoluteJointFlags (PxRevoluteJointFlags flags)=0 |
| | sets the flags specific to the Revolute Joint. More...
|
| |
| virtual void | setRevoluteJointFlag (PxRevoluteJointFlag::Enum flag, bool value)=0 |
| | sets a single flag specific to a Revolute Joint. More...
|
| |
| virtual PxRevoluteJointFlags | getRevoluteJointFlags () const =0 |
| | gets the flags specific to the Revolute Joint. More...
|
| |
| virtual void | setProjectionLinearTolerance (PxReal tolerance)=0 |
| | Set the linear tolerance threshold for projection. Projection is enabled if PxConstraintFlag::ePROJECTION is set for the joint. More...
|
| |
| virtual PxReal | getProjectionLinearTolerance () const =0 |
| | Get the linear tolerance threshold for projection. More...
|
| |
| virtual void | setProjectionAngularTolerance (PxReal tolerance)=0 |
| | Set the angular tolerance threshold for projection. Projection is enabled if PxConstraintFlag::ePROJECTION is set for the joint. More...
|
| |
| virtual PxReal | getProjectionAngularTolerance () const =0 |
| | gets the angular tolerance threshold for projection. More...
|
| |
| virtual const char * | getConcreteTypeName () const |
| | Returns string name of PxRevoluteJoint, used for serialization. More...
|
| |
| virtual void | setActors (PxRigidActor *actor0, PxRigidActor *actor1)=0 |
| | Set the actors for this joint. More...
|
| |
| virtual void | getActors (PxRigidActor *&actor0, PxRigidActor *&actor1) const =0 |
| | Get the actors for this joint. More...
|
| |
| virtual void | setLocalPose (PxJointActorIndex::Enum actor, const PxTransform &localPose)=0 |
| | Set the joint local pose for an actor. More...
|
| |
| virtual PxTransform | getLocalPose (PxJointActorIndex::Enum actor) const =0 |
| | get the joint local pose for an actor. More...
|
| |
| virtual PxTransform | getRelativeTransform () const =0 |
| | get the relative pose for this joint More...
|
| |
| virtual PxVec3 | getRelativeLinearVelocity () const =0 |
| | get the relative linear velocity of the joint More...
|
| |
| virtual PxVec3 | getRelativeAngularVelocity () const =0 |
| | get the relative angular velocity of the joint More...
|
| |
| virtual void | setBreakForce (PxReal force, PxReal torque)=0 |
| | set the break force for this joint. More...
|
| |
| virtual void | getBreakForce (PxReal &force, PxReal &torque) const =0 |
| | get the break force for this joint. More...
|
| |
| virtual void | setConstraintFlags (PxConstraintFlags flags)=0 |
| | set the constraint flags for this joint. More...
|
| |
| virtual void | setConstraintFlag (PxConstraintFlag::Enum flag, bool value)=0 |
| | set a constraint flags for this joint to a specified value. More...
|
| |
| virtual PxConstraintFlags | getConstraintFlags () const =0 |
| | get the constraint flags for this joint. More...
|
| |
| virtual void | setInvMassScale0 (PxReal invMassScale)=0 |
| | set the inverse mass scale for actor0. More...
|
| |
| virtual PxReal | getInvMassScale0 () const =0 |
| | get the inverse mass scale for actor0. More...
|
| |
| virtual void | setInvInertiaScale0 (PxReal invInertiaScale)=0 |
| | set the inverse inertia scale for actor0. More...
|
| |
| virtual PxReal | getInvInertiaScale0 () const =0 |
| | get the inverse inertia scale for actor0. More...
|
| |
| virtual void | setInvMassScale1 (PxReal invMassScale)=0 |
| | set the inverse mass scale for actor1. More...
|
| |
| virtual PxReal | getInvMassScale1 () const =0 |
| | get the inverse mass scale for actor1. More...
|
| |
| virtual void | setInvInertiaScale1 (PxReal invInertiaScale)=0 |
| | set the inverse inertia scale for actor1. More...
|
| |
| virtual PxReal | getInvInertiaScale1 () const =0 |
| | get the inverse inertia scale for actor1. More...
|
| |
| virtual PxConstraint * | getConstraint () const =0 |
| | Retrieves the PxConstraint corresponding to this joint. More...
|
| |
| virtual void | setName (const char *name)=0 |
| | Sets a name string for the object that can be retrieved with getName(). More...
|
| |
| virtual const char * | getName () const =0 |
| | Retrieves the name string set with setName(). More...
|
| |
| virtual void | release ()=0 |
| | Deletes the joint. More...
|
| |
| virtual PxScene * | getScene () const =0 |
| | Retrieves the scene which this joint belongs to. More...
|
| |
| template<class T > |
| T * | is () |
| |
| template<class T > |
| const T * | is () const |
| |
| PX_FORCE_INLINE PxType | getConcreteType () const |
| | Returns concrete type of object. More...
|
| |
| PX_FORCE_INLINE void | setBaseFlag (PxBaseFlag::Enum flag, bool value) |
| | Set PxBaseFlag. More...
|
| |
| PX_FORCE_INLINE void | setBaseFlags (PxBaseFlags inFlags) |
| | Set PxBaseFlags. More...
|
| |
| PX_FORCE_INLINE PxBaseFlags | getBaseFlags () const |
| | Returns PxBaseFlags. More...
|
| |
| virtual bool | isReleasable () const |
| | Whether the object is subordinate. More...
|
| |
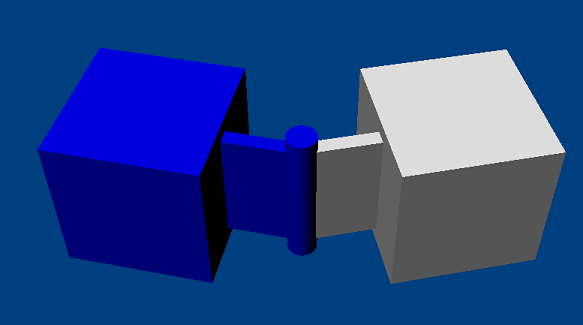
A joint which behaves in a similar way to a hinge or axle.
A hinge joint removes all but a single rotational degree of freedom from two objects. The axis along which the two bodies may rotate is specified with a point and a direction vector.
The position of the hinge on each body is specified by the origin of the body's joint frame. The axis of the hinge is specified as the direction of the x-axis in the body's joint frame.
A revolute joint can be given a motor, so that it can apply a force to rotate the attached actors. It may also be given a limit, to restrict the revolute motion to within a certain range. In addition, the bodies may be projected together if the distance or angle between them exceeds a given threshold.
Projection, drive and limits are activated by setting the appropriate flags on the joint.
- See also
- PxRevoluteJointCreate() PxJoint

 Public Member Functions inherited from PxJoint
Public Member Functions inherited from PxJoint