#include <PxSolverDefs.h>
◆ projectVelocity()
◆ PX_ALIGN()
| PxSolverBodyData::PX_ALIGN |
( |
16 |
, |
|
|
PxVec3 |
linearVelocity |
|
) |
| |
12 Pre-solver linear velocity
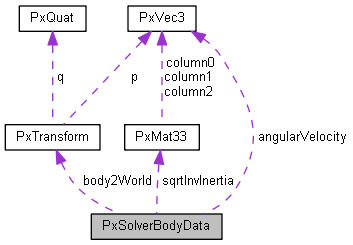
◆ angularVelocity
| PxVec3 PxSolverBodyData::angularVelocity |
28 Pre-solver angular velocity
◆ body2World
◆ invMass
| PxReal PxSolverBodyData::invMass |
◆ lockFlags
| PxU16 PxSolverBodyData::lockFlags |
◆ maxContactImpulse
| PxReal PxSolverBodyData::maxContactImpulse |
80 the max contact impulse
◆ nodeIndex
| PxU32 PxSolverBodyData::nodeIndex |
76 the node idx of this solverBodyData. Used by solver to reference between solver bodies and island bodies. Not required by immediate mode
◆ pad
| PxU16 PxSolverBodyData::pad |
◆ penBiasClamp
| PxReal PxSolverBodyData::penBiasClamp |
72 the penetration bias clamp
◆ reportThreshold
| PxReal PxSolverBodyData::reportThreshold |
32 contact force threshold
◆ sqrtInvInertia
| PxMat33 PxSolverBodyData::sqrtInvInertia |
68 inverse inertia in world space
The documentation for this struct was generated from the following file: