 |
|
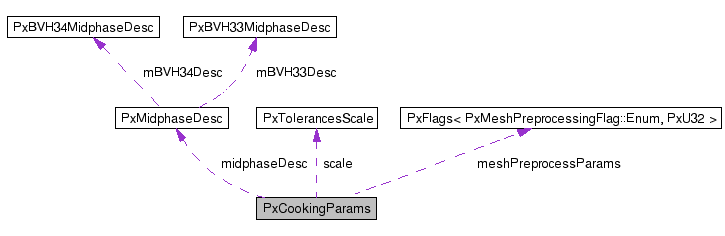
Structure describing parameters affecting mesh cooking. More...
#include <PxCooking.h>
Public Member Functions | |
| PxCookingParams (const PxTolerancesScale &sc) | |
Public Attributes | |
| float | areaTestEpsilon |
| Zero-size area epsilon used in convex hull computation. More... | |
| float | planeTolerance |
| Plane tolerance used in convex hull computation. More... | |
| PxConvexMeshCookingType::Enum | convexMeshCookingType |
| Convex hull creation algorithm. More... | |
| bool | suppressTriangleMeshRemapTable |
| When true, the face remap table is not created. This saves a significant amount of memory, but the SDK will not be able to provide the remap information for internal mesh triangles returned by collisions, sweeps or raycasts hits. More... | |
| bool | buildTriangleAdjacencies |
| When true, the triangle adjacency information is created. You can get the adjacency triangles for a given triangle from getTriangle. More... | |
| bool | buildGPUData |
| When true, addigional information required for GPU-accelerated rigid body simulation is created. This can increase memory usage and cooking times for convex meshes and triangle meshes. More... | |
| PxTolerancesScale | scale |
| Tolerance scale is used to check if cooked triangles are not too huge. This check will help with simulation stability. More... | |
| PxMeshPreprocessingFlags | meshPreprocessParams |
| Mesh pre-processing parameters. Used to control options like whether the mesh cooking performs vertex welding before cooking. More... | |
| PxReal | meshWeldTolerance |
| Mesh weld tolerance. If mesh welding is enabled, this controls the distance at which vertices are welded. If mesh welding is not enabled, this value defines the acceptance distance for mesh validation. Provided no two vertices are within this distance, the mesh is considered to be clean. If not, a warning will be emitted. Having a clean, welded mesh is required to achieve the best possible performance. More... | |
| PxMidphaseDesc | midphaseDesc |
| Controls the desired midphase desc structure for triangle meshes. More... | |
| PxU32 | gaussMapLimit |
| Vertex limit beyond which additional acceleration structures are computed for each convex mesh. Increase that limit to reduce memory usage. Computing the extra structures all the time does not guarantee optimal performance. There is a per-platform break-even point below which the extra structures actually hurt performance. More... | |
Structure describing parameters affecting mesh cooking.
|
inline |
| float PxCookingParams::areaTestEpsilon |
Zero-size area epsilon used in convex hull computation.
If the area of a triangle of the hull is below this value, the triangle will be rejected. This test is done only if PxConvexFlag::eCHECK_ZERO_AREA_TRIANGLES is used.
Default value: 0.06f*PxTolerancesScale.length*PxTolerancesScale.length
Range: (0.0f, PX_MAX_F32)
| bool PxCookingParams::buildGPUData |
When true, addigional information required for GPU-accelerated rigid body simulation is created. This can increase memory usage and cooking times for convex meshes and triangle meshes.
Default value: false
| bool PxCookingParams::buildTriangleAdjacencies |
When true, the triangle adjacency information is created. You can get the adjacency triangles for a given triangle from getTriangle.
Default value: false
| PxConvexMeshCookingType::Enum PxCookingParams::convexMeshCookingType |
Convex hull creation algorithm.
Default value: PxConvexMeshCookingType::eQUICKHULL
| PxU32 PxCookingParams::gaussMapLimit |
Vertex limit beyond which additional acceleration structures are computed for each convex mesh. Increase that limit to reduce memory usage. Computing the extra structures all the time does not guarantee optimal performance. There is a per-platform break-even point below which the extra structures actually hurt performance.
Default value: 32
| PxMeshPreprocessingFlags PxCookingParams::meshPreprocessParams |
Mesh pre-processing parameters. Used to control options like whether the mesh cooking performs vertex welding before cooking.
Default value: 0
| PxReal PxCookingParams::meshWeldTolerance |
Mesh weld tolerance. If mesh welding is enabled, this controls the distance at which vertices are welded. If mesh welding is not enabled, this value defines the acceptance distance for mesh validation. Provided no two vertices are within this distance, the mesh is considered to be clean. If not, a warning will be emitted. Having a clean, welded mesh is required to achieve the best possible performance.
The default vertex welding uses a snap-to-grid approach. This approach effectively truncates each vertex to integer values using meshWeldTolerance. Once these snapped vertices are produced, all vertices that snap to a given vertex on the grid are remapped to reference a single vertex. Following this, all triangles' indices are remapped to reference this subset of clean vertices. It should be noted that the vertices that we do not alter the position of the vertices; the snap-to-grid is only performed to identify nearby vertices.
The mesh validation approach also uses the same snap-to-grid approach to identify nearby vertices. If more than one vertex snaps to a given grid coordinate, we ensure that the distance between the vertices is at least meshWeldTolerance. If this is not the case, a warning is emitted.
Default value: 0.0
| PxMidphaseDesc PxCookingParams::midphaseDesc |
Controls the desired midphase desc structure for triangle meshes.
Default value: PxMeshMidPhase::eBVH33
| float PxCookingParams::planeTolerance |
Plane tolerance used in convex hull computation.
The value is used during hull construction. When a new point is about to be added to the hull it gets dropped when the point is closer to the hull than the planeTolerance. The planeTolerance is increased according to the hull size.
If 0.0f is set all points are accepted when the convex hull is created. This may lead to edge cases where the new points may be merged into an existing polygon and the polygons plane equation might slightly change therefore. This might lead to failures during polygon merging phase in the hull computation.
It is recommended to use the default value, however if it is required that all points needs to be accepted or huge thin convexes are created, it might be required to lower the default value.
Default value: 0.0007f
Range: <0.0f, PX_MAX_F32)
| PxTolerancesScale PxCookingParams::scale |
Tolerance scale is used to check if cooked triangles are not too huge. This check will help with simulation stability.
| bool PxCookingParams::suppressTriangleMeshRemapTable |
When true, the face remap table is not created. This saves a significant amount of memory, but the SDK will not be able to provide the remap information for internal mesh triangles returned by collisions, sweeps or raycasts hits.
Default value: false