
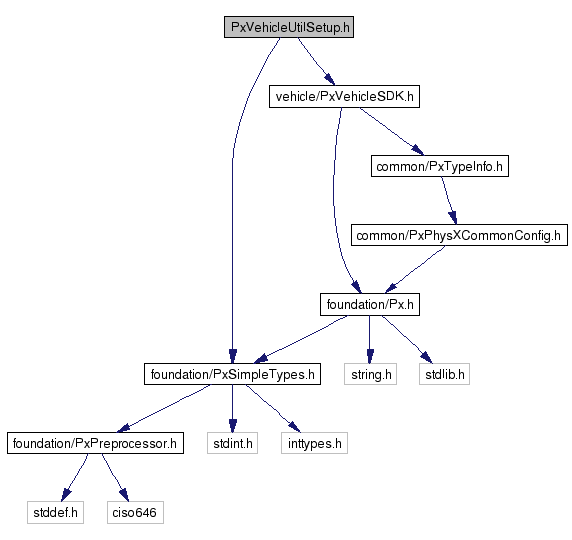
#include "foundation/PxSimpleTypes.h"#include "vehicle/PxVehicleSDK.h"
Go to the source code of this file.
Classes | |
| class | PxVehicleCopyDynamicsMap |
| Used by PxVehicleCopyDynamicsData. More... | |
Functions | |
| void | PxVehicle4WEnable3WTadpoleMode (PxVehicleWheelsSimData &wheelsSimData, PxVehicleWheelsDynData &wheelsDynData, PxVehicleDriveSimData4W &driveSimData) |
| Reconfigure a PxVehicle4W instance as a three-wheeled car with tadpole config (2 front wheels, 1 rear wheel). | |
| void | PxVehicle4WEnable3WDeltaMode (PxVehicleWheelsSimData &wheelsSimData, PxVehicleWheelsDynData &wheelsDynData, PxVehicleDriveSimData4W &driveSimData) |
| Reconfigure a PxVehicle4W instance as a three-wheeled car with delta config (1 front wheel, 2 rear wheels). | |
| void | PxVehicleComputeSprungMasses (const PxU32 nbSprungMasses, const PxVec3 *sprungMassCoordinates, const PxVec3 ¢reOfMass, const PxReal totalMass, const PxU32 gravityDirection, PxReal *sprungMasses) |
| Compute the sprung masses of the suspension springs given (i) the number of sprung masses, (ii) coordinates of the sprung masses, (iii) the center of mass offset of the rigid body, (iv) the total mass of the rigid body, and (v) the direction of gravity (0 for x-axis, 1 for y-axis, 2 for z-axis). | |
| void | PxVehicleUpdateCMassLocalPose (const PxTransform &oldCMassLocalPose, const PxTransform &newCMassLocalPose, const PxU32 gravityDirection, PxVehicleWheels *vehicle) |
| Reconfigure the vehicle to reflect a new center of mass local pose that has been applied to the actor. The function requires (i) the center of mass local pose that was last used to configure the vehicle and the vehicle's actor, (ii) the new center of mass local pose that has been applied to the vehicle's actor and will now be applied to the vehicle, and (iii) the direction of gravity (0 for x-axis, 1 for y-axis, 2 for z-axis). | |
| void | PxVehicleCopyDynamicsData (const PxVehicleCopyDynamicsMap &wheelMap, const PxVehicleWheels &src, PxVehicleWheels *trg) |
| Copy dynamics data from src to trg, including wheel rotation speed, wheel rotation angle, engine rotation speed etc. | |