|
| virtual void | setJointType (PxArticulationJointType::Enum jointType)=0 |
| |
| virtual PxArticulationJointType::Enum | getJointType () const =0 |
| |
| virtual void | setMotion (PxArticulationAxis::Enum axis, PxArticulationMotion::Enum motion)=0 |
| |
| virtual PxArticulationMotion::Enum | getMotion (PxArticulationAxis::Enum axis) const =0 |
| |
| virtual void | setLimit (PxArticulationAxis::Enum axis, const PxReal lowLimit, const PxReal highLimit)=0 |
| |
| virtual void | getLimit (PxArticulationAxis::Enum axis, PxReal &lowLimit, PxReal &highLimit)=0 |
| |
| virtual void | setDrive (PxArticulationAxis::Enum axis, const PxReal stiffness, const PxReal damping, const PxReal maxForce, bool isAccelerationDrive=false)=0 |
| |
| virtual void | getDrive (PxArticulationAxis::Enum axis, PxReal &stiffness, PxReal &damping, PxReal &maxForce, bool &isAcceleration)=0 |
| |
| virtual void | setDriveTarget (PxArticulationAxis::Enum axis, const PxReal target)=0 |
| |
| virtual void | setDriveVelocity (PxArticulationAxis::Enum axis, const PxReal targetVel)=0 |
| |
| virtual PxReal | getDriveTarget (PxArticulationAxis::Enum axis)=0 |
| |
| virtual PxReal | getDriveVelocity (PxArticulationAxis::Enum axis)=0 |
| |
| virtual void | setFrictionCoefficient (const PxReal coefficient)=0 |
| |
| virtual PxReal | getFrictionCoefficient () const =0 |
| |
| virtual const char * | getConcreteTypeName () const |
| | Returns string name of dynamic type. More...
|
| |
| virtual void | setMaxJointVelocity (const PxReal maxJointV)=0 |
| |
| virtual PxReal | getMaxJointVelocity () const =0 |
| |
| virtual PxArticulationLink & | getParentArticulationLink () const =0 |
| | get the parent articulation link to which this articulation joint belongs More...
|
| |
| virtual void | setParentPose (const PxTransform &pose)=0 |
| | set the joint pose in the parent frame More...
|
| |
| virtual PxTransform | getParentPose () const =0 |
| | get the joint pose in the parent frame More...
|
| |
| virtual PxArticulationLink & | getChildArticulationLink () const =0 |
| | get the child articulation link to which this articulation joint belongs More...
|
| |
| virtual void | setChildPose (const PxTransform &pose)=0 |
| | set the joint pose in the child frame More...
|
| |
| virtual PxTransform | getChildPose () const =0 |
| | get the joint pose in the child frame More...
|
| |
| virtual PxArticulationJointImpl * | getImpl ()=0 |
| |
| virtual const PxArticulationJointImpl * | getImpl () const =0 |
| |
| virtual | ~PxArticulationJointBase () |
| |
| virtual void | release ()=0 |
| | Releases the PxBase instance, please check documentation of release in derived class. More...
|
| |
| template<class T > |
| T * | is () |
| |
| template<class T > |
| const T * | is () const |
| |
| PX_FORCE_INLINE PxType | getConcreteType () const |
| | Returns concrete type of object. More...
|
| |
| PX_FORCE_INLINE void | setBaseFlag (PxBaseFlag::Enum flag, bool value) |
| | Set PxBaseFlag. More...
|
| |
| PX_FORCE_INLINE void | setBaseFlags (PxBaseFlags inFlags) |
| | Set PxBaseFlags. More...
|
| |
| PX_FORCE_INLINE PxBaseFlags | getBaseFlags () const |
| | Returns PxBaseFlags. More...
|
| |
| virtual bool | isReleasable () const |
| | Whether the object is subordinate. More...
|
| |
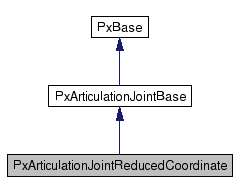
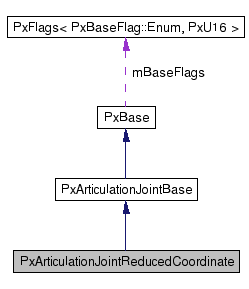
a joint between two links in an articulation.
The joint model is very similar to a PxSphericalJoint with swing and twist limits, and an implicit drive model.
- See also
- PxArticulation PxArticulationLink

 Public Member Functions inherited from PxArticulationJointBase
Public Member Functions inherited from PxArticulationJointBase